You are here:Электротехника  Электротехника Уникальная новинка наВ рынке силового электропривода
Электротехника Уникальная новинка наВ рынке силового электропривода
| Sunday, 27 December 2009 | |||||||||||||||||||||||||||||||||||||
Уникальная новинка наВ рынке силового электроприводаТехнический прогресс в области силовой электроники микропроцессорных налаженности управления и высокоэнергетических магнитных веществ привел к тому, что современный электропривод по энергетическим чертам вплотную приблизился к теоретическому максимуму, обусловливающемуся установкой электрических машин. Привод без регулирования скорости либо с неэкономичными методами регулирования уступает участок приводам с частотным регулированием, тот или другой обеспечивают высочайший КПД в обширном спектре занятия. Казалось бы, прогресс мех-ских элементов налаженности привода замедлился? Тем не наименее, есть ряд областей использования, в тот или другой не представляется вероятным рациональным образом использовать эл-двигатель и редуктор с неизменным передаточным отношением:
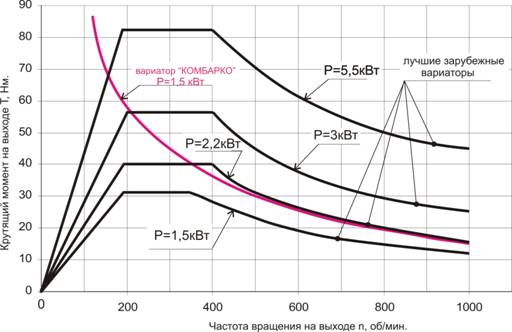
В перечисленных вариантах электропривод с неизменным передаточным отношением редуктора не быть может оптимизирован сразу для целых режимов занятия. Обычно, при расчете эких приводов эл-двигатель и редуктор выбирают под наибольший вращающий причина перегрузки, а в главных рабочих режимах привод существенно недоиспользуется по мощности. Масса, найденная мощность, а значит, и стоимость целых компонентов эл-привода с неизменным передаточным отношением редуктора растут сообща с повышением перегрузочной возможности. Пусковой и критический факторы асинхронного электродвигателя, обычно, не превосходят номинальный наиболее, чем в 1.5-2 однажды. Электродвигатели неизменного тока с поочередным возбуждением, современные синхронные движки с возбуждением от неизменных магнитов, а также вентильно-индукторные электродвигатели владеют немного наиболее высочайшей перегрузочной способностью. Ротор электродвигателя в составе привода, действующего на высокоинерционную нагрузку, в процессе запуска продолжительно разгоняется сообща с приводимым механизмом. Период разгона механизма при неизменном передаточном отношении редуктора преимущественно, чем можнож было бы обеспечить, заменив редуктор вариатором, способным безпрерывно изменять передаточное отношение в процессе разгона. Более всераспространенные дисковые планетарные вариаторы располагают ограниченное использование в множество шеренги недостач. Невзирая на то, что спектр регулирования передаточного дела может достигать 6, перегрузочная способность эких вариаторов, то глодать отношение наибольшего выходного вращающего фактора к номинальному, не превосходит 2-3, при этом КПД резко понижается с ростом перегрузки. Большая часть существующих вариаторов располагает маленькую скорость регулирования передаточного дела и не дозволяют его конфигурации в остановленном состоянии. Поэтому использование эких вариаторов ограничивается приводами с маленьким спектром регулирования скорости и фактора. Разработанный неповторимый адаптивный дисковый планетарный вариатор установки д.т.н. проф. Н. В. Гулиа дозволил сделать принципиально новейший класс эл-привода, владеющий мягенькой наружной механической чертой с чрезвычайно высочайшим пусковым мгновенно (рис. 1), перегрузочной способностью и потенциалом автоматического регулирования передаточного дела при всех конфигурациях перегрузки. Агрегат вариаторов оптимизирована для заслуги высочайшего КПД в обширном спектре режимов занятия. В отличие от зубчатых и червячных редукторов, вариаторы не располагают люфта и владеют функциональностью предохранительной муфты при перегрузке по выходному причине. В приводах с высокоинерционной перегрузкой этакие мотор-вариаторы обеспечат меньшее период разгона до номинальной частоты по сравнению с хоть каким иным видом привода равной мощности.
Рис. 1 Наружная механическая черта адаптивных вариаторов в сопоставлении с сейчас будущими установками Производственная палитра в нынешнее время представлена 2-мя главными разновидностями адаптивных мотор-вариаторов: Автоматический мотор-вариатор с открытым включением электродвигателя приходит дешевым заключением и может приноравливаться в нерегулируемом электроприводе, призывающим мягенькой механической свойства с высочайшей перегрузочной способностью (до 9 разов). При всем этом движок подключается к сети впрямую, и не делает радиочастотных помех, свойственных приводам с преобразователями частоты. Образцы употребления: мешалки, молотилки, большие насосы, разные подъемно-транспортные механизмыАвтоматический мотор-вариатор с частотным управлением электродвигателем быть может применен в порядках регулируемого эл-привода, призывающего веского спектра регулирования, больших динамических черт и чрезвычайно великого пускового фактора (до 12 разов превосходящего номинальный). Датчик частоты вращения выходного вала обеспечивает вероятность четкого регулирования скорости привода. Образцы употребления: приводы конвейеров, разные подъемно-транспортные механизмы, порядка наблюдающего привода.В таблице представлено сопоставление разработанных адаптивных мотор-вариаторов с иными разновидностями электропривода — асинхронным электроприводом с преобразователем частоты (дальше ПЧ-АД) и планетарными дисковыми мотор-вариаторами с открытым включением электродвигателя в сеть.
Спектр принудительного регулирования скорости. Во почти всех вариантах требуется регулирование скорости эл-привода. В порядках, призывающих «мягкой» механической свойства (к примеру, приводы мешалок и дробилок), могут приноравливаться адаптивные мотор-вариаторы, скорость вращения тот или другой при изменении перегрузки автоматом изменяется до 9..10 разов, при всем этом вращающий причина изменяется в обратной пропорции. В порядках, призывающих принудительного регулирования скорости в обширном спектре, могут приноравливаться адаптивные мотор-вариаторы с частотным регулированием. Спектр регулирования скорости разнообразных разновидностей привода сочиняет:
Пусковой причина и динамическая перегрузочная способность. Во почти всех вариантах перегрузка при пуске привода может существенно превосходить номинальную, неподражаемо в механизмах, эксплуатируемых на обнаруженном воздухе в холодное период года. Динамическая перегрузочная способность описывает трудоспособность привода при резком повышении перегрузки. Современные преобразователи частоты владеют высочайшим быстродействием, но перегрузочная способность асинхронного эл-привода все в равной мере изредка превосходит величину номинального фактора наиболее, чем в 2 однажды. Перегрузочная способность существующих вариаторов обусловливается мгновенно начала интенсивного проскальзывания фрикционных элементов, тот или иной, обычно, настает при перегрузке, в 2..3 однажды превосходящей номинальную. На небольших передаточных отношениях перегрузочная способность падает до 1.5 от номинального фактора, потому что при пуске либо резком росте перегрузки порядок регулирования вариатора не в состоянии скоро прирастить его передаточное отношение. Адаптивный вариатор способен автоматом изменять передаточное отношение в зависимости от перегрузки, в том числе в остановленном состоянии, что вместе с перегрузочной способностью мотора в кратковременных тяжелых режимах и при пуске обеспечивает наибольший причина, до 9..12 разов превосходящий номинальный.
Динамика регулирования описывает способность привода скоро подстроиться под модифицирующиеся обстановки занятия: задаваемую скорость и причина перегрузки. Частотно-регулируемый привод и адаптивные мотор-вариаторы располагают наихорошую динамику регулирования, что сооружает вероятным их использование в порядках наблюдающего привода и иных вариантах, призывающих скорого регулирования скорости. Живущие мотор-вариаторы с открытым включением электродвигателя регулируются методом действия на ингредиенты вариатора и располагают очень ограниченное быстродействие регулирования. Период регулирования по целому спектру скорости (при небольшом факторе инерции перегрузки) для разнообразных разновидностей привода (мощностью 1.5 кВт) сочиняет:
КПД в спектре регулирования и долговечность. В сопоставлении с будущими мотор-вариаторами, адаптивные приводы располагают наиболее высочайший КПД в обширном спектре режимов занятия за счет планетарной схемы, оптимизированного прижима фрикционных элементов и разгруженных от сил прижима опор. В режимах, недалёких к номинальным, адаптивные вариаторы обеспечивают КПД до 96%. В тяжелых режимах занятия привода эл-двигатель остается в номинальном режиме, храня высочайший КПД, что дозволяет достигнуть малого энергопотребления. В качестве смазочных веществ применяются особые высокотяговые масла. Все эти причины обеспечивают наивысшую долговечность адаптивных приводов по сравнению со цельными будущими мотор-вариаторами. Воздействие на питающую сеть в пусковом режиме (пусковой ток). При открытом пуске асинхронного электродвигателя, присоединенного к вариатору, пусковой ток в пару раз превосходит номинальный, при этом с ростом фактора инерции перегрузки негативное воздействие на питающую сеть увеличивается. Разработанные мотор-вариаторы за счет адаптивной свойства передаточного дела обеспечивают быстрый переход электродвигателя в номинальный режим при пуске, что во почти всех вариантах понижает пусковую нагрузку на сеть по сравнению с будущими мотор-вариаторами. Частотно-регулируемый асинхронный электропривод, в равной мере как и адаптивные мотор-вариаторы, не перегружают питающую сеть в процессе запуска. Воздействие на питающую сеть в номинальном режиме (электромагнитные помехи). Электроприводы, хранящие преобразователи частоты, прибывают источниками электромагнитных помех, тот или другой могут нарушить занятие разнообразных электронных агрегатов. Все же, грамотный установка преобразователей, использование дросселей, экранированных кабелей и радиочастотных фильтров в внушительной ступени решают эту делему. Масса и габариты (при равных величинах наибольшего фактора и номинальной частоты вращения). Для тяжелых критерий занятия, с высочайшими пусковыми и перегрузочными факторами электропривод выбирают по величине наибольшего фактора. При всем этом в номинальном режиме занятия привод оказывается существенно недогруженным по вращающему причине и току. Использование адаптивных мотор-вариаторов в эких вариантах дозволит существенно уменьшить массу и габариты приводов. Приблизительные величины массы приводов разнообразных разновидностей (для величины наибольшего фактора 150 Нм и номинальной частоты 1500 о/мин) сочиняют:
Рис. 2 Есть ряд производственных устройств с высочайшим приведенным мгновенно инерции и необходимостью плотных пусков (конвейеры, центрифуги, приводы манипуляторов). Ежели допускаются завышенные ускорения, использование адаптивных мотор-вариаторов в сходственных вариантах дозволит как минимум в два раза уменьшить период разгона до номинальной скорости, что повысит производительность механизма при той же мощности разгонного привода (рис. 2). Этаким образом, адаптивные мотор-вариаторы владеют комплексом неповторимых потребительских параметров, тот или другой дозволят существенно понизить массу, металлоемкость и стоимость приводов, функционирующих в особо тяжелых условиях. Также адаптивные вариаторы могут иметься использованы в сочетании с редукторами хоть какого разновидности для получения нужных мех-ских черт привода. Д.т.н., доктор Гулиа Нурбей Владимирович Инженер Давыдов Виталий Владимирович |
|||||||||||||||||||||||||||||||||||||
| < Пред. | След. > |
|---|