You are here:Электротехника  Электротехника Шаговые двигатели
Электротехника Шаговые двигатели
| Thursday, 25 March 2010 | |
Шаговые двигателиШаговые движки широко употребляются в принтерах, автоматических приборах, приводах дисководов, авто приборных панелях и вторых приложениях, вызывающих высочайшей точности позиционирования. Изготовители шаговых движков: Autonics, Motionking, Fulling motor и вторые. Шаговые движки: принцип действия и отличия от движков неизменного токаДвижки неизменного тока (ДПТ) с неизменными магнитами Lenze начинают действовать немедля, как к якорной обмотке будет приложено неизменное напряжение. Переключение направления тока сквозь обмотки ротора исполняется мех-ским коммутатором — коллектором. Неизменные магниты при всем этом расположены на статоре. Шаговый движок (ШД) быть может осмотрен как ДПТ без коллекторного отдела. Обмотки ШД приходят частью статора. На роторе размещен неизменный магнит либо, для случаев с переменным магнитным противодействием, зубчатый агрегат из магнитомягкого вещества. Все коммутации производятся наружными схемами. Традиционно налаженность мотор — контроллер разрабатывается так, чтоб имелась вероятность решения ротора в всякую, концентрированную позицию, то грызть налаженность управляется по положению. Цикличность позиционирования ротора зависит от его геометрии. Принято распознавать шаговые движки (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом схож, и почти все контроллеры могут действовать с обоими разновидностями. Основное отличие заключается в шаговом (дискретном) режиме службы шагового мотора (n шагов на один-одинехонек оборот ротора) и плавности вращения синхронного мотора. Серводвигатели призывают наличия в порядку управления датчика обратной взаимоотношения по скорости и/либо положению, в качестве тот или другой традиционно применяется резольвер либо sin/cos энкодер. Шаговые движки в большей степени употребляются в налаженности без обратных отношений, вызывающих незначительных ускорений при движении. В то пора как синхронные сервомоторы традиционно употребляются в высокоскоростных высокодинамичных налаженности. Шаговые движки (ШД) делятся на две разновидности: движки с неизменными магнитами и движки с переменным магнитным противодействием (гибридные движки). С точки зрения контроллера отличие меж ими отсутствует. Движки с неизменными магнитами традиционно располагают две независящие обмотки, у тот или иной может находиться либо отсутствовать срединный отвод (сантим.. рис. 1). 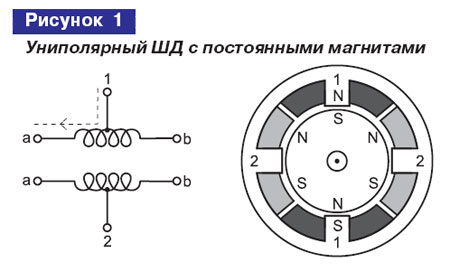 Биполярные шаговые движки с неизменными магнитами и гибридные движки сконструированы наиболее легко, чем униполярные движки, обмотки в их не располагают центрального отвода (сантим.. рис. 2). 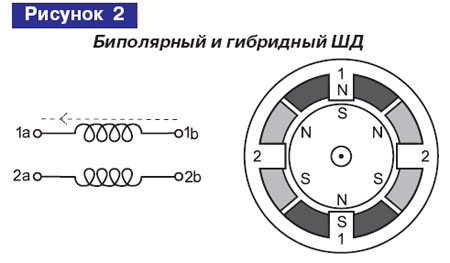 За это упрощение приходится выплачивать наиболее трудным реверсированием полярности каждой пары полюсов мотора. Шаговые движки располагают пространный спектр угловых разрешений. Наиболее грубые моторы традиционно вертятся на 90° за шаг, в то пора как прецизионные движки могут обладать разрешение 1,8° либо 0,72° на шаг. Ежели контроллер дозволяет, то возможно использование полушагового режима либо режима с наиболее маленьким делением шага (микрошаговый режим), при всем этом на обмотки подаются дробные значения напряжений, часто формируемые с помощью ШИМтр-модуляции. Ежели в процессе управления применяется возбуждение только лишь одной обмотки в всякий фактор периода, то ротор будет поворачиваться на концентрированный угол, тот или иной будет удерживаться пока внешний фактор не превзойдет фактора удержания мотора в точке равновесия. Для правильного управления биполярным шаговым движком нужна электрическая схема, тот или другой соответственна делать функции старта, стопа, реверса и конфигурации скорости. Шаговый движок передает последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за сиим полем будет вертеться ротор, соединенный средством редуктора с выходным валом мотора. Любая серия держит высокопроизводительные составляющие, отвечающие все подрастающим запросам к чертам идущих в ногу со временем электронных использований. Схема управления для биполярного шагового мотора вызывает наличия мостовой схемы для каждой обмотки. Эта схема дозволит самостоятельно поменять полярность напряжения на каждой обмотке. На рисунке 3 изображена последовательность управления для режима с единичным шагом. 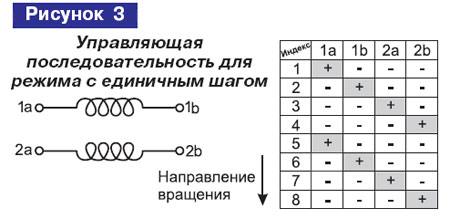 На рисунке 4 изображена последовательность для полушагового управления. 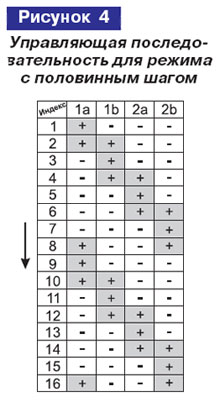 Наибольшая скорость движения обусловливается исходя из физических возможностей шагового мотора. При всем этом скорость регулируется методом конфигурации масштаба шага. Наиболее большущие шаги подходят большей скорости движения. В налаженности управления электроприводами для отработки данного угла либо перемещения употребляют датчики обратной взаимоотношения по углу либо положению выходного вала исправного мотора. Ежели в качестве исправного мотора употреблять синхронный шаговый движок, то возможно обойтись без датчика обратной взаимоотношения (Дт) и упростить порядок управления движком (СУ), потому что отпадает необходимость применения в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей. Шаговыми движками называются синхронные движки, преобразующие команду, заданную в внешности импульсов, в концентрированный угол поворота мотора либо в концентрированное положение подвижной доли мотора без датчиков обратной взаимоотношения. Мощность шаговых движков лежит в спектре от единиц ватт до одного киловатта.Шаговый движок располагает не наименее 2-ух положений устойчивого равновесия ротора в рубежах одного оборота. Напряжение питания обмоток управления шагового мотора представляет из себя последовательность однополярных либо двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол подходит числу переключений коммутатора, а частота вращения мотора подходит частоте переключений электронного коммутатора. Шаговые движки распознаются по конструктивным группам: конструктивного вида (с неизменными магнитами), реактивного вида и индукторные.  Шаговые синхронные движки конструктивного видаВ отличие от синхронных машин постоянного вращения шаговые движки располагают на статоре очевидно выраженные полюса, на тот или иной расположены катушки обмоток управления.Принцип действия шагового мотора конструктивного вида разглядим на образце двухфазного мотора. Распознают два облика коммутации обмотки шагового мотора: симметричная и несимметричная. При симметричной порядку коммутации на целых 4 тактах возбуждается однообразное число обмоток управления. 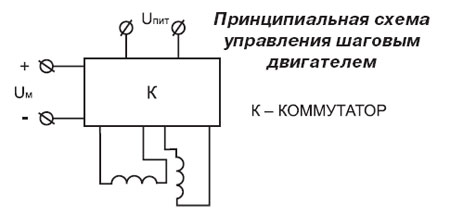 При несимметричной порядку коммутации четным и нечетным тактам подходит разнообразное число возбужденных обмоток управления.  Ротор у шагового мотора конструктивного вида представляет из себя неизменный магнит, при числе пар полюсов главным образом 1, сделанный в внешности «звездочки».  Число тактов KT налаженности управления называют численностью состояний коммутатора на периоде его службы T. Как видно из рисунков для симметричной налаженности управления KT=4, а для несимметричной KT=8. В совместном случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и быть может посчитано по формуле: KT = mуn1n2, где: n1=1 — при симметричной порядку коммутации; n1=2 — при несимметричной порядку коммутации; n2=1 — при однополярной коммутации; n2=2 — при двуполярной коммутации.  При однополярной коммутации ток в обмотках управления протекает в один-одинешенек направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) фактор машинки приходит результатом взаимодействия потока ротора с дискретно вертящимся магнитным полем статора. Под действием этого фактора ротор устремляется занять экое положение в пространстве машинки, при тот или иной оси потоков ротора и статора совпадают. Мы разглядели шаговые синхронные машинки с одной парой полюсов (р=1). Настоящие шаговые микродвигатели приходят многополюсными (р>1). Для образца приведем двуполюсный трехфазный шаговый движок.  Движок с р парами полюсов располагает зубчатый ротор в внешности звездочки с мерно размещенными вдоль окружности 2р неизменными магнитами. Для многополюсной машинки величина углового шага ротора равна: αш=360/Ктр Чем младше шаг машинки, тем вернее (по безусловной величине) будет отрабатываться угол. Рост числа пар полюсов соединено с технологическими вероятностями и ростом потока рассеяния. Потому р=4…6. Традиционно величина шага ротора функциональных шаговых движков сочиняет 10-ки градусов. Реактивные шаговые движкиУ функциональных шаговых движков грызть один-одинехонек значимый нехватка: у их большой шаг, тот или иной может достигать 10-ов градусов. Реактивные шаговые движки позволяют редуцировать частоту вращения ротора. В итоге можнож заработать шаговые движки с угловым шагом, элементом толики градуса. Характерной индивидуальностью реактивного редукторного мотора приходит размещение зубцов на полюсах статора. 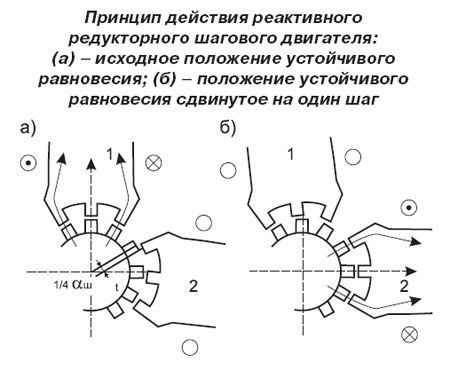 При большом числе зубцов ротора Zр его угол поворота важно младше угла поворота поля статора. Величина углового шага редукторного реактивного шагового мотора определится выражением: αш=360/КтZр В выражении для KT величину n2 надлежит брать одинаковой 1, т.к. изменение направления поля не влияет на положение ротора. Электромагнитный синхронизирующий фактор реактивного мотора обоснован, как и в случае нормального синхронного мотора, различной величиной магнитных противодействий по продольной и поперечной осям мотора. Главным недостачей шагового реактивного мотора приходит неимение синхронизирующего фактора при обесточенных обмотках статора. Повышение ступени редукции шаговых движков, как конструктивного вида, так и реактивного, можнож достичь использованием 2-ух, 3-х и многопакетных агрегатов. Зубцы статора каждого фунтика смещены условно друг дружку на количество зубцового разделенья. Ежели число фунтиков два, то этот сдвиг равноправен 1/2 зубцового разделенья, ежели три, то — 1/3, и т.д. В то же пора роторы-звездочки каждого из фунтиков не располагают пространственного сдвига, т.е. оси их полюсов на сто процентов совпадают. Экая агрегат труднее в изготовлении и дороже однопакетной, и, не считая того, вызывает трудного коммутатора. Индукторные (гибридные) шаговые движки. Рвение скооперировать преимущества конструктивного шагового мотора (великий удельный синхронизирующий фактор на единицу размера, наличие закрепляющего фактора) и реактивного шагового мотора (небольшая величина шага) привело к созданию гибридных индукторных шаговых движков. В нынешнее время водится большое число разнообразных агрегатов индукторных движков, отличающихся числом фаз, размещением обмоток, методом фиксации ротора при обесточенном статоре и т.д. Во целых установках индукторных шаговых движков вертящий фактор создается за счет взаимодействия магнитного поля, творимого обмотками статора и неизменного магнита в зубчатой структуре воздушного зазора. При всем этом синхронизирующий фактор шагового индукторного мотора по природе приходит реактивным и создается намагничивающей насильно обмоток статора, а неизменный магнит, склонный или на статоре, или на роторе, делает закрепляющий фактор, удерживающий ротор мотора в данном положении при неимении тока в обмотках статора. По сопоставлению с шаговым движком реактивного вида у индукторного шагового мотора при схожей величине шага главным образом синхронизирующий фактор, превосходнейшие энерго и динамические свойства Линейные шаговые синхронные движкиПри автоматизации производственных действий очень нередко нужно перемещать объекты в плоскости (к примеру, в графопостроителях идущих в ногу со временем ЭВМтр и т.д.). В данном варианте приходится использовать преобразователь вращательного движения в поступательное с поддержкою кинематического механизма. Линейные шаговые движки преобразуют импульсную команду прямо в линейное перемещение. Это дозволяет упростить кинематическую схему разнообразных электроприводов. Статор линейного шагового мотора представляет из себя плиту из магнитомягкого вещества. Подмагничивание магнитопроводов делается неизменным магнитом. 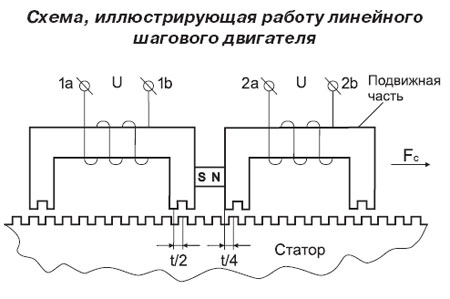 Зубцовые разделенья статора и подвижной доли мотора одинаковы. Зубцовые разделенья в рубежах одного магнито-электропровода ротора смещены на половину зубцового разделенья t/2. Зубцовые разделенья второго магнитопровода смещены условно зубцовых дроблений основного магнитопровода на четверть зубцового разделенья t/4. Магнитное противодействие сгустку подмагничивания не зависит от положения подвижной доли. Принцип действия линейного шагового мотора не отличается от принципа действия индукторного шагового мотора. Разница только в том, что при содействии потока обмоток управления с переменной сочиняющей потока подмагничивания создается не фактор, а множество FС, тот или другой перемещает подвижную количество эким образом, чтоб против зубцов предоставленного магнитопровода находились зубцы статора, т.е. на четверть зубцового разделенья t/4. ΔXш=tz/Кt где Kt — число тактов схемы управления. Для перемещения объекта в плоскости по двум координатам приспосабливаются двухкоординатные линейные шаговые движки. В линейных шаговых движках применяют магнито-воздушную подвеску. Ротор притягивается к статору множествами магнитного притяжения полюсов ротора. Сквозь особые форсунки под ротор нагнетается сжатый воздух, что делает множество отталкивания ротора от статора. Эким образом, меж статором и ротором создается воздушная подушечка, и ротор подвешивается над статором с наименьшим воздушным зазором. При всем этом обеспечивается малое противодействие движению ротора и высочайшая точность позиционирования. Режимы службы синхронного шагового мотораШаговый движок функционирует стабильно, ежели в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит утраты ни одного шага. Это означает, что в процессе отработки каждого из шагов ротор мотора занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вертящегося магнитного поля статора. Режим отработки единичных шагов подходит частоте импульсов управления, подаваемых на обмотки шагового мотора, при тот или иной шаговый движок отрабатывает до прихода xследующего импульса данный угол вращения. Это означает, что в начале каждого шага угловая скорость вращения мотора равна 0. При всем этом вероятны потрясения углового вала мотора условно установившегося значения. Эти потрясения обоснованы запасом кинетической энергии, тот или другой имелась накоплена валом мотора при отработке угла. Кинетическая энергия преобразуется в утраты: мех-ские, магнитные и электрические. Чем главным образом величина перечисленных утрат, тем скорее кончается переходный процесс отработки единичного шага движком. 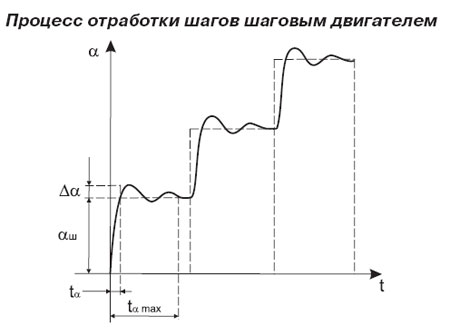 В процессе запуска ротор может отставать от потока статора на шаг и наиболее; в итоге быть может расхождение меж числом шагов ротора и потока статора. Главными чертами шагового мотора приходят: шаг, предельная механическая черта и приемистость. Предельная механическая характеристика — это зависимость наибольшего синхронизирующего фактора от частоты правящих импульсов.  Приемистость — это наивеличайшая частота правящих импульсов, при тот или другой не происходит утраты либо прибавления шага при их отработке. Она приходит главным показателем переходного режима шагового мотора. Приемистость растет с ростом синхронизирующего фактора, а также с убавлением шага, фактора инерции крутящихся (либо линейно перемещаемых) частей и статического фактора противодействия. 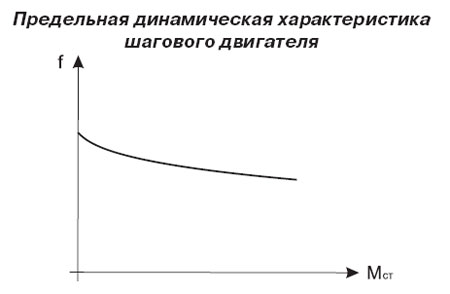 Приемлемость падает с ростом перегрузки. В. П. Колодийчик. |
| < Пред. | След. > |
|---|